

What is the representation of the Automatic Flight Control System (AFCS) series actuator?
-
A
It is not visible in the cockpit due to its brief operational duration.
-
B
The pilot receives indications of its operation through movement on the adi/eadi.
-
C
Information about it is conveyed to the pilot based on control stick position.
-
D
The cockpit display reflects its status as a result of input and output signals.
Refer to figures.
Actuators move the flying controls in response to signals from a computer. They may be:
- in series or
- in parallel with the normal control runs.
Also, they can be:
- electromechanical or
- electro-hydraulic.
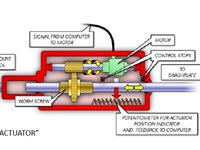
A series actuator:
- Is a fast-acting (HIGH SPEED) linear mechanical device in series with the control run.
- Converts an electrical signal into a displacement of its output shaft relative to its body. A neutral position is achieved when the free end of the output shaft is at mid-travel.
- Moves the aerofoil surfaces.
- Has limited authority (10%-20%).
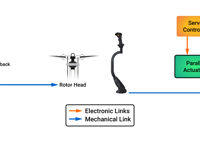
More specifically, in a series actuator system, an attitude sensor feeds a signal to the computer, which sends a demand to the actuator. The actuator, mechanically through the motor or hydraulically, moves the control rods to the pitch change mechanism, such as the swash plate and by extension, the surfaces.
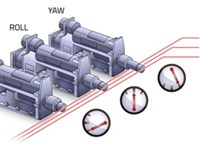
In the cockpit, three small dials (input and output signals) close together show you what the series actuators are doing (feedback from a parallel actuator is felt through the controls).
Your Notes (not visible to others)
This question has appeared on the real examination, you can find the related countries below.


